Skip to main content
Skip to main content
 RVS 3.24 accelerates multicore software verification
RVS 3.24 accelerates multicore software verification
 Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
 Rapita System Announces New Distribution Partnership with COONTEC
Rapita System Announces New Distribution Partnership with COONTEC
 RVS gets a new timing analysis engine
RVS gets a new timing analysis engine
 How to measure stack usage through stack painting with RapiTest
How to measure stack usage through stack painting with RapiTest
 What does AMACC Rev B mean for multicore certification?
What does AMACC Rev B mean for multicore certification?
 How emulation can reduce avionics verification costs: Sim68020
How emulation can reduce avionics verification costs: Sim68020
 How to achieve multicore DO-178C certification with Rapita Systems
How to achieve multicore DO-178C certification with Rapita Systems
 How to achieve DO-178C certification with Rapita Systems
How to achieve DO-178C certification with Rapita Systems
 Certifying Unmanned Aircraft Systems
Certifying Unmanned Aircraft Systems
 DO-278A Guidance: Introduction to RTCA DO-278 approval
DO-278A Guidance: Introduction to RTCA DO-278 approval
 Test what you fly - Real code, Real Conditions Webinar
Test what you fly - Real code, Real Conditions Webinar
 Avionics Certification Q&A: CERT TALK
Avionics Certification Q&A: CERT TALK
 XPONENTIAL 2026
XPONENTIAL 2026
 DO-178C Multicore In-person Training (Heathrow)
DO-178C Multicore In-person Training (Heathrow)










Welcome back to the series of blog posts on how the presence of advanced hardware features in modern processors makes it more difficult to establish the worst-case execution time (WCET) of an application. This week, we consider the difficulties presented by one recent development in CPU design: multicore processors.
Multicore processors
Increasing complexity and functionality in embedded systems demands higher overall system performance. However in recent years, heat and power constraints have made it more difficult to increase CPU performance by increasing the clock speeds, so semiconductor manufacturers have turned to multicore as an effective way of increasing the available processing power of a device. Originally employed in desktop computers in the mid-2000s, multicore devices are now being developed for use in embedded systems, such as Freescale's PowerPC-derived QoriQ P4080 or Infineon's forthcoming AURIX series.
As there is no increase in clock speed with a multicore CPU, it is necessary to fully utilise all the available processing cores in a multicore device in order to achieve an overall performance increase. Typically, the approach taken is to combine functionality that would previously have been executed on several devices, so that each application runs on one core of the multicore device.
This approach typically improves the overall size and power requirements for the system, but does not normally result in increased performance for any one application. As the interest in multicore architectures grows, a number of research projects (including parMERASA) are currently examining how parallel software can be developed to truly exploit the increased processing capacity brought about by multicore.
WCET analysis and current multicore devices
From a real-time perspective, the key problems with multicore processors are related to communication, both with external devices and also between the individual cores themselves. A single core device has unrestricted access to its memory bus, and to any external resources to which it is directly connected. Although a typical multicore processor may have four, eight, or even more processing cores, most current architectures have a single memory bus that must be shared by all cores.
Therefore, if a core needs to access memory, the amount of time this takes is dependent not only on the size of the data and the speed at which the memory can be accessed, but also on whether any other cores are accessing memory at the same time. This introduces an additional waiting time, which must be considered as a component in any calculation of the worst-case execution time.
Although it is theoretically possible to define an architecture in which the waiting time is bounded, this is not supported by any of the currently-available multicore devices, where the worst-case memory access time is unspecified and unpredictable. To compound the problem, devices like the P4080 make extensive use of cache memories to speed up the overall execution in the average case, so any WCET analysis also has to contend with cache issues. The combination of all these factors leads to a WCET that is very difficult to calculate, and often contains a very high degree of pessimism.
RapiTime and multicore processors
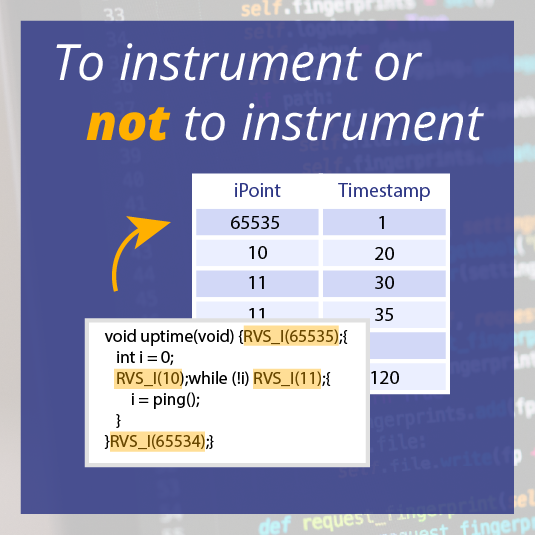
Rapita's tools are well-placed to help with the development of real-time systems using multicore processors. As it makes use of data collected during on-target execution of the system, RapiTime is able to measure the times associated with memory accesses or external resources. Combined with an appropriate testing strategy, RapiTime can help to provide information about the behaviour of software under typical operating conditions.
The next post in this series will consider how parallelisation of applications can help improve the performance of real-time applications but also creates new problems that make real-time analysis hard.
DO-178C webinars

White papers

Mitigation of interference in multicore processors for A(M)C 20-193

Developing DO-178C and ED-12C-certifiable multicore software

Efficient Verification Through the DO-178C Life Cycle

A Commercial Solution for Safety-Critical Multicore Timing Analysis