Skip to main content
Skip to main content
 Rapita Systems Collaborates with Wind River to Break the Multicore Certification Barrier
Rapita Systems Collaborates with Wind River to Break the Multicore Certification Barrier
 Rapita Systems Launches Next Generation of MACH178 for Multicore
Rapita Systems Launches Next Generation of MACH178 for Multicore
 RVS 3.24 accelerates multicore software verification
RVS 3.24 accelerates multicore software verification
 Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
 Retro gaming with the Sim68020
Retro gaming with the Sim68020
 RVS gets a new timing analysis engine
RVS gets a new timing analysis engine
 How to measure stack usage through stack painting with RapiTest
How to measure stack usage through stack painting with RapiTest
 What does AMACC Rev B mean for multicore certification?
What does AMACC Rev B mean for multicore certification?
 How to achieve multicore DO-178C certification with Rapita Systems
How to achieve multicore DO-178C certification with Rapita Systems
 How to achieve DO-178C certification with Rapita Systems
How to achieve DO-178C certification with Rapita Systems
 Certifying Unmanned Aircraft Systems
Certifying Unmanned Aircraft Systems
 DO-278A Guidance: Introduction to RTCA DO-278 approval
DO-278A Guidance: Introduction to RTCA DO-278 approval
 Certification Together International Conference (CTIC)
Certification Together International Conference (CTIC)
 DO-178C Multicore Virtual Training
DO-178C Multicore Virtual Training
 HISC 2026
HISC 2026










If you're working with multithreaded critical embedded software, you probably want to know how your task scheduling affects the execution behavior of your code. You may even need to provide evidence of this to certify your software. In this post, we show how to perform task scheduling analysis with RapiTask without having to instrument the tasks in a system directly.
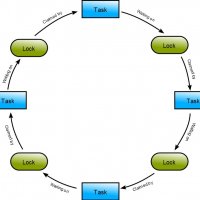
We'll demonstrate this using an example system that includes multiple tasks (individual executables) and a context switch routine that prioritizes and schedules them (Figure 1).
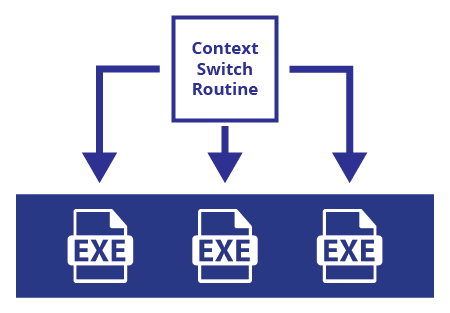
Figure 1. System architecture
RapiTask works by adding instrumentation to the source code, so that when it is executed, a routine is called which logs and timestamps the execution.
To produce timing data in our example system, we instrument the context switch routine, but not the tasks themselves; Figure 2 shows an example of this.
void TaskSwitchContext( void )
{
RVS_I(5); // Context switch out
// Find the highest priority task pending and switch to it
TopReadyPriority = TopPriority;
while( ReadyTasksLists[ TopReadyPriority ].Pending == 0 )
{
TopReadyPriority -= 1;
}
TaskSwitchFrames(CurrentTask, ReadyTasksLists[ TopReadyPriority ]);
CurrentTask = ReadyTasksLists[ TopReadyPriority ];
RVS_I(6); // Context switch in
RVS_I(CurrentTask.Ident); // New task ID
}
Figure 2. Instrumenting the context switch routine; RVS instrumentation highlighted
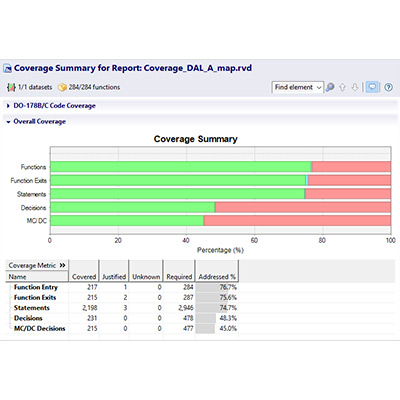
Next, we run tests on the system with RapiTask to produce reports on the execution time behavior of the code during each test (Figure 3).
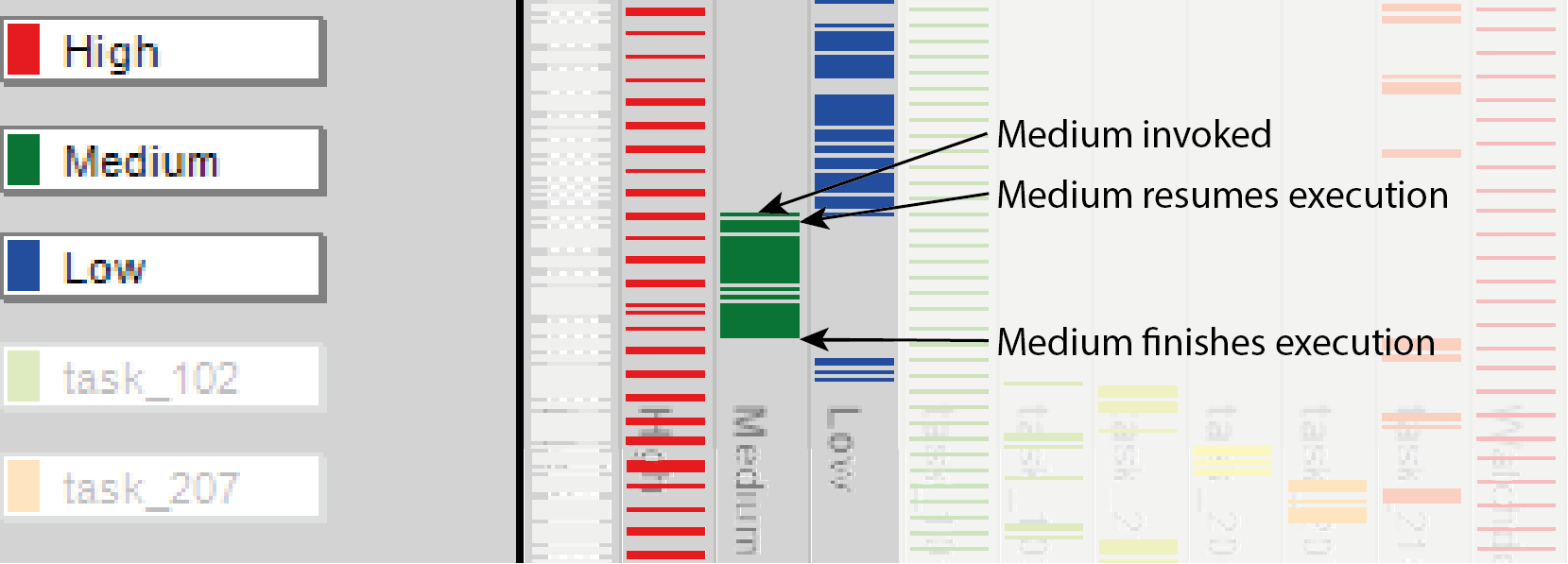
Figure 3. RapiTask execution time behavior chart
This gives us data on every time each task starts execution, but doesn't tell us whether this is due to a new invocation of the task or resuming a previous execution that was pre-empted. To get this information, we have to take into account the system's scheduling priorities.
The names of the tasks highlighted in our example represent their priority; High has the highest priority, and Low has the lowest. Using this knowledge and the RapiTask report shown in Figure 3, we can safely infer when Medium is first invoked, when it resumes execution after being pre-empted by High , and when it finishes execution; these points are marked on Figure 3.
If you're an embedded engineer with a detailed understanding of your system's scheduling behavior, you can use RapiTask reports to easily identify issues in your code, for example cycle slips. Let's imagine that each time Medium is invoked, it must finish each execution within 50 ms. Using our knowledge of the system's priorities, we can infer when each invocation of Medium starts and ends and use this to identify cycle slips.
The approach to collecting execution time data described here means you don't need to instrument the tasks you're analyzing. This is useful when you can't instrument tasks (for example because you don't have access to the source code, only the executable, in a system like the one in Figure 1), or if you want to avoid the overheads of instrumenting them (for example because your target is resource-constrained).
If you want to know more about RapiTask, contact us or request a trial.
DO-178C webinars

White papers

Mitigation of interference in multicore processors for A(M)C 20-193

Developing DO-178C and ED-12C-certifiable multicore software

Efficient Verification Through the DO-178C Life Cycle

A Commercial Solution for Safety-Critical Multicore Timing Analysis