Skip to main content
Skip to main content
 Rapita Systems Collaborates with Wind River to Break the Multicore Certification Barrier
Rapita Systems Collaborates with Wind River to Break the Multicore Certification Barrier
 Rapita Systems Launches Next Generation of MACH178 for Multicore
Rapita Systems Launches Next Generation of MACH178 for Multicore
 RVS 3.24 accelerates multicore software verification
RVS 3.24 accelerates multicore software verification
 Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
 The Evolution of DO-178 and ED-12 Standards
The Evolution of DO-178 and ED-12 Standards
 Retro gaming with the Sim68020
Retro gaming with the Sim68020
 RVS gets a new timing analysis engine
RVS gets a new timing analysis engine
 How to measure stack usage through stack painting with RapiTest
How to measure stack usage through stack painting with RapiTest
 How to achieve multicore DO-178C certification with Rapita Systems
How to achieve multicore DO-178C certification with Rapita Systems
 How to achieve DO-178C certification with Rapita Systems
How to achieve DO-178C certification with Rapita Systems
 Certifying Unmanned Aircraft Systems
Certifying Unmanned Aircraft Systems
 DO-278A Guidance: Introduction to RTCA DO-278 approval
DO-278A Guidance: Introduction to RTCA DO-278 approval
 DASC 2026
DASC 2026
 DO-178C Multicore Virtual Training
DO-178C Multicore Virtual Training
 HISC 2026
HISC 2026










Despite (or possibly because) multi-core systems development use the same programming languages, and largely similar design methods as single-core systems, migrating applications from single-core to multi-core systems can present some unexpected challenges.
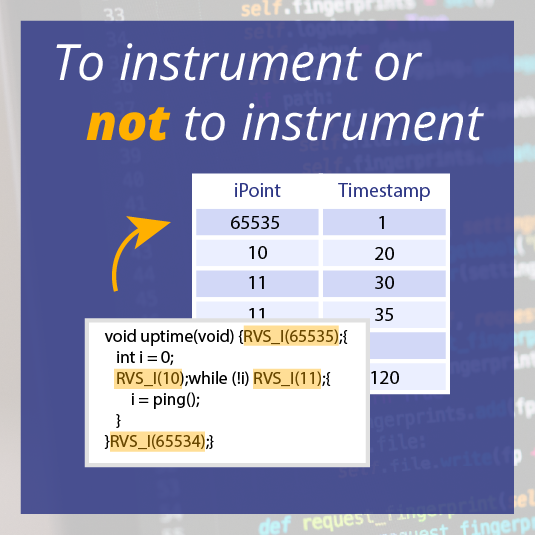
Recently I was experimenting with a multi-core system within the CRAFTERS project, running different code on each core. To see the application's timing, I had instrumented all of the code using RapiTime. The instrumentation is used to record which parts of the program are being run, and at what time. As a preliminary approach, the instrumentation code wrote into a memory buffer common to all cores.
This is the same approach I would take with a single-core, multitasking system. At the end of the test runs, the content of the buffer would be retrieved and demultiplexed to individual tasks (or cores in the case of multi-core systems). Timing measurements can then be attributed to individual tasks.
In the case of the multi-core system I was experimenting with, this approach led to some unexpected timing measurements, with a very high density of Ipoints. Investigating further, I noticed by inspecting the trace files that each of the cores executed almost exactly the same number of instrumentation points. This was peculiar because the code executing on each core was very different (see the RapiTask trace window screenshot) – I would have expected there to be a big difference between the number of instrumentation points executed, especially over a long test run.
The cause of this behavior turned out to be the bus arbitration for the processor. Writes to the shared memory take a (relatively) long time. Because the instrumentation code was executed relatively frequently, this led to frequent conflicts. As the bus arbitration was handled in a round-robin manner, the code was effectively being synchronized through the instrumentation points, leading to this unusual timing and Ipoint density the system experienced.
A simple resolution to this system was to modify the instrumentation to use local (per-core) memory, and avoid the involvement of the bus arbitration unit. This also had the benefit of making our instrumentation code faster.
This illustrates an important point about multi-core development: most of the issues that we are likely to experience arise from behaviors that are not directly related to the functionality of the code. Consequently, it is important to have access to tools such as RapiTask, which allow you to explore system behavior in detail, and to identify such anomalies, which is an essential precondition to being able to resolve them. 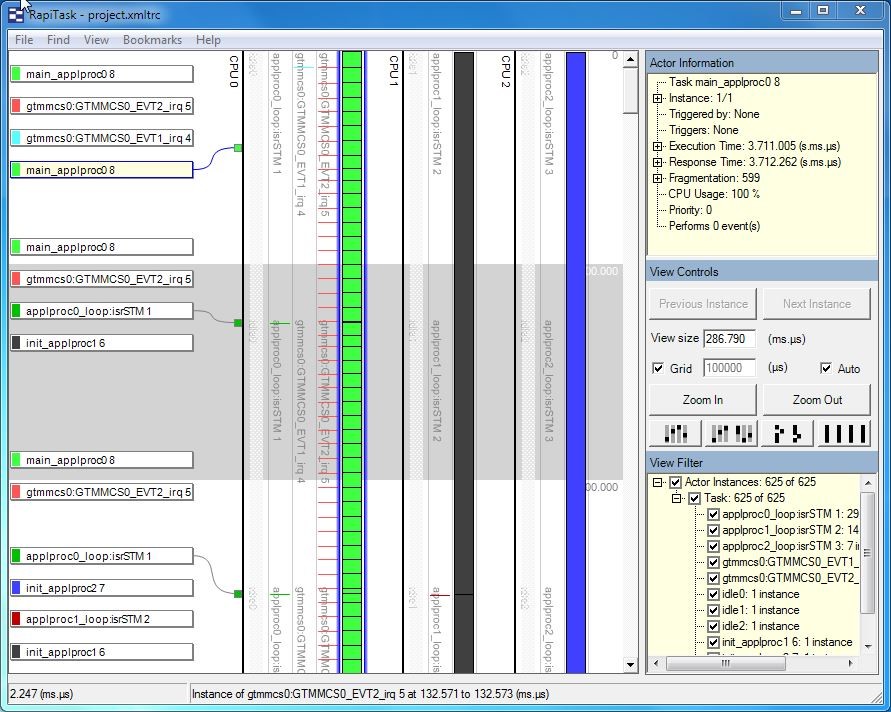
DO-178C webinars

White papers

Mitigation of interference in multicore processors for A(M)C 20-193

Developing DO-178C and ED-12C-certifiable multicore software

Efficient Verification Through the DO-178C Life Cycle

A Commercial Solution for Safety-Critical Multicore Timing Analysis