Skip to main content
Skip to main content
 Rapita Systems Collaborates with Wind River to Break the Multicore Certification Barrier
Rapita Systems Collaborates with Wind River to Break the Multicore Certification Barrier
 Rapita Systems Launches Next Generation of MACH178 for Multicore
Rapita Systems Launches Next Generation of MACH178 for Multicore
 RVS 3.24 accelerates multicore software verification
RVS 3.24 accelerates multicore software verification
 Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
 The Evolution of DO-178 and ED-12 Standards
The Evolution of DO-178 and ED-12 Standards
 Retro gaming with the Sim68020
Retro gaming with the Sim68020
 RVS gets a new timing analysis engine
RVS gets a new timing analysis engine
 How to measure stack usage through stack painting with RapiTest
How to measure stack usage through stack painting with RapiTest
 How to achieve multicore DO-178C certification with Rapita Systems
How to achieve multicore DO-178C certification with Rapita Systems
 How to achieve DO-178C certification with Rapita Systems
How to achieve DO-178C certification with Rapita Systems
 Certifying Unmanned Aircraft Systems
Certifying Unmanned Aircraft Systems
 DO-278A Guidance: Introduction to RTCA DO-278 approval
DO-278A Guidance: Introduction to RTCA DO-278 approval
 DO-178C Multicore Virtual Training
DO-178C Multicore Virtual Training
 HISC 2026
HISC 2026










The avionics industry is moving more and more towards the use of multicore platforms and applications. While this presents benefits in terms of improved performance, it also presents challenges in terms of meeting specific multicore guidance A(M)C 20-193 and CAST-32A. A major obstacle in meeting this guidance is understanding and quantifying the impact of interference on platform and application behavior. Various strategies are available to mitigate interference from board and chip manufacturers and RTOS vendors. When these strategies are used, their effectiveness must be verified.
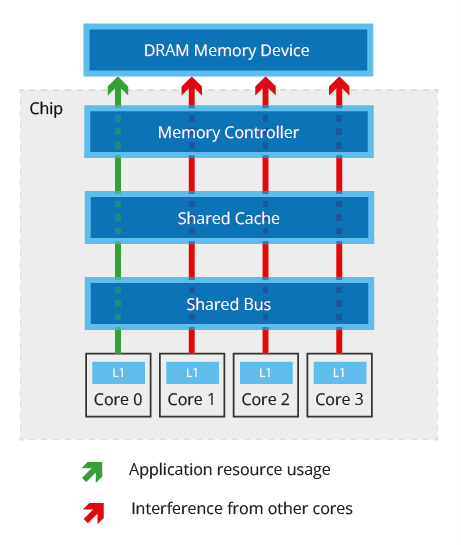
For single core systems, it is relatively straightforward to analyze software timing behavior and put an upper bound on the system’s worst-case timing behavior. For multicore systems, however, this is more challenging. Contention for shared resources such as caches, buses and interconnects in a multicore system increase non-determinism in timing behavior, as the timing behavior of an application accessing a shared resource may depend on whether or not other cores are simultaneously trying to access the same resource, and this isn’t necessarily known. Effects leading to this non-determinism are known as interference, and the channels through which they occur (e.g. a particular shared cache) are known as interference channels (Figure 1).
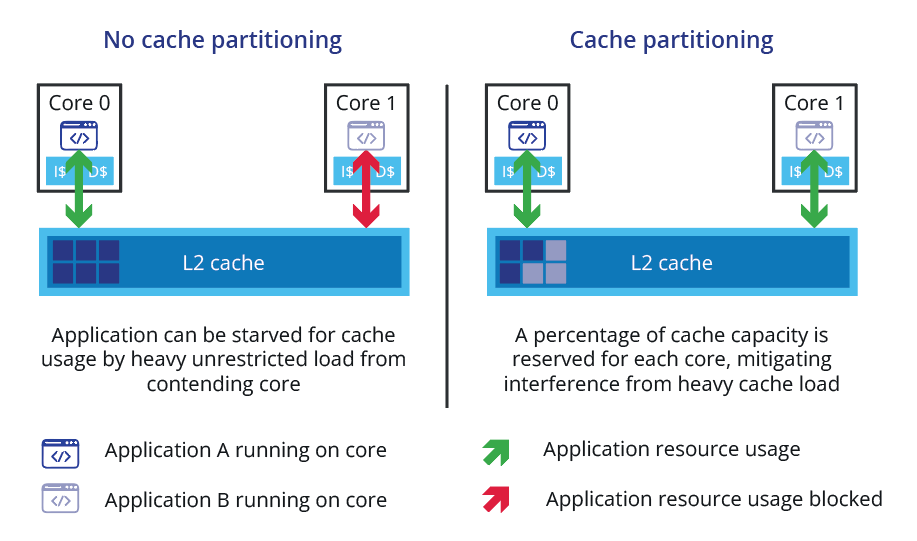
To comply with A(M)C 20-193 objectives, all interference channels in a system must be considered. Interference channels can be direct (obvious), indirect (non-obvious/obscure), or unknown (undocumented channels that must be discovered). Some channels can be mitigated (either fully or partially) by disabling hardware, imposing constraints on the design (for instance, cache partitioning), or using run-time protection mechanisms (for example bandwidth monitoring or fine-grained locking). Cache partitioning, for example, provides protection from one core/partition evicting the other by making sure no two cores/partitions use the same section of the cache (Figure 2).
While mitigation mechanisms can help reduce required verification effort, verification is still required regardless of which mitigation mechanism is used (MCP_Resource_Usage_3, Figure 3). For example, when an interference channel is fully mitigated by disabling a component, verification is needed to demonstrate that the component is disabled and remains disabled while the software is running. When an interference channel is partially mitigated by design or through run-time protection mechanisms, the effectiveness of the mitigations must be verified to demonstrate that the interference is within acceptable bounds.
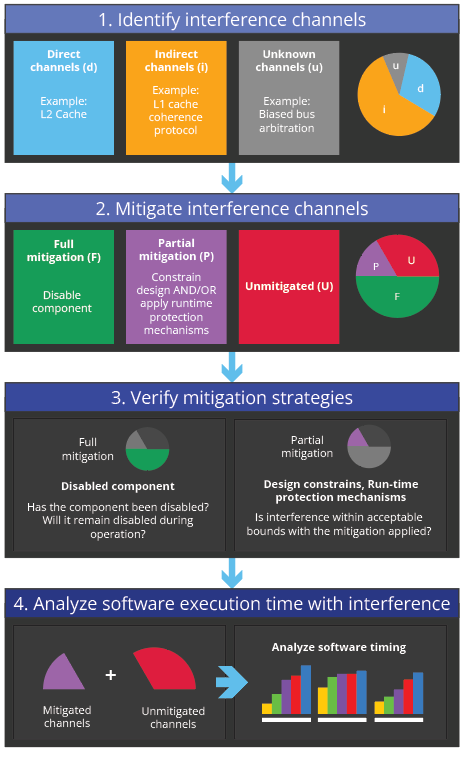
After interference channels have been understood and mitigation mechanisms verified, software timing behavior must be analyzed (Figure 3). This must be done in the context of any interference channels that are active in the system (even channels that have been partially mitigated).
Specialist expertise and technology is needed to identify interference channels, verify the effectiveness of mitigation strategies, and analyze execution time behavior for multicore systems in line with A(M)C 20-193 objectives. Rapita’s MACH178 solution supports this end-to-end.
Wanting to learn more about A(M)C 20-193 or CAST-32A certification? Our Multicore DO-178C training courses may be just what you’re looking for.
DO-178C webinars

White papers

Mitigation of interference in multicore processors for A(M)C 20-193

Developing DO-178C and ED-12C-certifiable multicore software

Efficient Verification Through the DO-178C Life Cycle

A Commercial Solution for Safety-Critical Multicore Timing Analysis