Skip to main content
Skip to main content
 RVS 3.24 accelerates multicore software verification
RVS 3.24 accelerates multicore software verification
 Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
 Rapita System Announces New Distribution Partnership with COONTEC
Rapita System Announces New Distribution Partnership with COONTEC
 Retro gaming with the Sim68020
Retro gaming with the Sim68020
 RVS gets a new timing analysis engine
RVS gets a new timing analysis engine
 How to measure stack usage through stack painting with RapiTest
How to measure stack usage through stack painting with RapiTest
 What does AMACC Rev B mean for multicore certification?
What does AMACC Rev B mean for multicore certification?
 How to achieve multicore DO-178C certification with Rapita Systems
How to achieve multicore DO-178C certification with Rapita Systems
 How to achieve DO-178C certification with Rapita Systems
How to achieve DO-178C certification with Rapita Systems
 Certifying Unmanned Aircraft Systems
Certifying Unmanned Aircraft Systems
 DO-278A Guidance: Introduction to RTCA DO-278 approval
DO-278A Guidance: Introduction to RTCA DO-278 approval
 Test what you fly - Real code, Real Conditions Webinar
Test what you fly - Real code, Real Conditions Webinar
 Avionics Certification Q&A: CERT TALK
Avionics Certification Q&A: CERT TALK
 XPONENTIAL 2026
XPONENTIAL 2026
 DO-178C Multicore In-person Training (Heathrow)
DO-178C Multicore In-person Training (Heathrow)










Some time ago, I wrote about interprocess communication without interrupt locks, using a circular buffer. This is a really useful technique, if you want to provide buffered data transfer between a reader and a writer without introducing blocking into your application.
This approach isn’t suitable if you want to receive the most up-to-date data, for example when sampling from some external input device. Fortunately, the same source (the MASCOT design methodology), provides another approach to interprocess communication which is also non-blocking. In this case, the emphasis is on a “wait-free” protocol that guarantees the reader gets access to the most recent valid data.
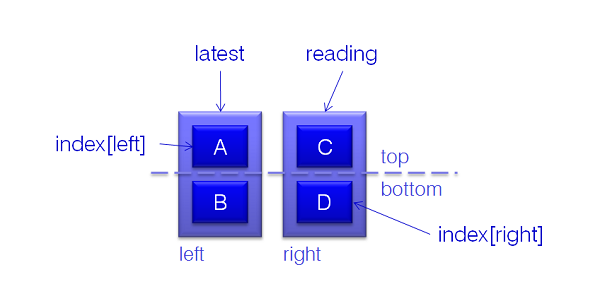
This approach is based on Simpson’s four-slot algorithm. In this approach, the four slots are arranged as two pairs (left and right), and within each pair we have top and bottom slots. There are two processes: a reader process and a writer process. The writer (as its name implies) stores its data to one of the slots. It is also responsible for writing two control values:
latest, which indicates which pair (leftorright) the writer most recently wrote to;index, which indicates which slot of each pair (toporbottom) the writer most recently wrote to.
The reader also writes to a control value, reading, which indicates which pair is being read from.
When storing a new value the writer:
- selects the pair that is not being pointed to by
reading; - toggles the value of
indexfor that pair; - writes the slot pointed to by the new value of
index; - updates
latestto point to the pair which has just been written to.
In the case of the diagram, if the next action is a write, this would result in index[left] is updated to point to slot B. When reading a value the reader:
- updates
readingto the same value aslatest; - uses
readingand theindexfor the pair pointed to byreadingto read the specific slot.
From the diagram, if the next action is a read, slot A would be returned. Provided that you can write latest, index and reading atomically (i.e. without being interrupted part way through), this approach can be implemented without interrupt locks or other OS synchronization features – it could even be coded at the application level (rather than within the OS)
A very nice feature of this protocol results from the fact that no conditional statements are used – the protocol always executes a fixed set of statements for writing values and a fixed set of statements for reading values. From our perspective this has two interesting effects:
- It’s very easy to achieve 100% MC/DC on the reading and writing functions;
- There will be less variability in execution time from this approach than for other interprocess communication approaches.
DO-178C webinars

White papers

Mitigation of interference in multicore processors for A(M)C 20-193

Developing DO-178C and ED-12C-certifiable multicore software

Efficient Verification Through the DO-178C Life Cycle

A Commercial Solution for Safety-Critical Multicore Timing Analysis