 Skip to main content
Skip to main content
 Rapita Systems Collaborates with Wind River to Break the Multicore Certification Barrier
Rapita Systems Collaborates with Wind River to Break the Multicore Certification Barrier
 Rapita Systems Launches Next Generation of MACH178 for Multicore
Rapita Systems Launches Next Generation of MACH178 for Multicore
 RVS 3.24 accelerates multicore software verification
RVS 3.24 accelerates multicore software verification
 Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
 The Evolution of DO 178 and ED-12 Standards
The Evolution of DO 178 and ED-12 Standards
 Retro gaming with the Sim68020
Retro gaming with the Sim68020
 RVS gets a new timing analysis engine
RVS gets a new timing analysis engine
 How to measure stack usage through stack painting with RapiTest
How to measure stack usage through stack painting with RapiTest
 How to achieve multicore DO-178C certification with Rapita Systems
How to achieve multicore DO-178C certification with Rapita Systems
 How to achieve DO-178C certification with Rapita Systems
How to achieve DO-178C certification with Rapita Systems
 Certifying Unmanned Aircraft Systems
Certifying Unmanned Aircraft Systems
 DO-278A Guidance: Introduction to RTCA DO-278 approval
DO-278A Guidance: Introduction to RTCA DO-278 approval
 DO-178C Multicore Virtual Training
DO-178C Multicore Virtual Training
 HISC 2026
HISC 2026










Advanced multicore verification for modern avionics
The streamlined solution for certifying multicore avionics for A(M)C 20-193 and AA-22-01

MACH178
How does it help?
MACH178 provides a blueprint and supporting tools to support the use of multicore platforms in safety-critical software from planning to approval.
Provided as a set of Packs that layer capabilities, MACH178 helps define a certification approach, evaluate multicore platforms and configurations, and certify software in both single active core and multicore modes.
The solution helps organizations accelerate project timelines, reduce certification risk, and develop internal expertise to run multicore projects more efficiently.
EXPLORE MACH178




MACH178
What does it include?
MACH178 includes guidance, tools and off-the-shelf certification evidence in packages designed to support you from early planning through to certification.
Some activities for certification must be performed on the final target configuration. MACH178 provides the guidance, tools and training needed for your organization or an accredited service partner to perform these activities on time and on budget.

THE SOLUTION FOR A(M)C 20-193, DO-178C & AA-22-01 CERTIFICATION
Multicore projects require compliance with guidance such as DO‑178C and A(M)C 20‑193. MACH178 products are built to help you meet these requirements throughout your project life cycle.
| Objective | Direct Support | Consultancy + Guidance |
|---|---|---|
| MCP_Planning_1 | ✓ | ✓ |
| MCP_Planning_2 | ✓ | ✓ |
| MCP_Resource_Usage_1 | ✓ | ✓ |
| MCP_Resource_Usage_2 | N/A* | N/A* |
| MCP_Resource_Usage_3 | ✓ | ✓ |
| MCP_Resource_Usage_4 | ✓ | ✓ |
| MCP_Software_1 | ✓ | ✓ |
| MCP_Software_2† | ✓ | ✓ |
| MCP_Error_Handling_1 | ✓ | ✓ |
| MCP_Accomplishment_Summary | ✓ | ✓ |
| Description | Obj. | Direct Support | Consultancy + Guidance |
|---|---|---|---|
| Requirements-based testing | 6.4.a-d | ✓ | ✓ |
| Target computer Compatibility | 6.4.e | ✓ | ✓ |
| Correctness of test results | 6.4.5.c | ✓ | ✓ |
| Requirements coverage | 6.4.4.a-b | ✓ | ✓ |
| Structural coverage analysis | 6.4.4.c | ✓ | ✓ |
| DC/CC analysis | 6.4.4.d | ✓ | ✓ |
| Additional code verification | 6.4.4.c | ✓ | ✓ |
| Requirements traceability | 6.3.1.f, 6.3.2.f | ✓ | ✓ |
| Software partitioning integrity | 6.3.3.f | ✓ | ✓ |
| Source Code is accurate and consistent | 6.3.4.f | ✓ | ✓ |
MACH178 also support related standards such as AMACC and AA-22-01.
*MCP_Resource_Usage_2 is a reserved objective from CAST-32A that is no longer required for A(M)C 20-193 compliance but is required by A(M)C 20-152A objective COTS-8.
†Support through RapiCoupling, scheduled for release H1 2027.
FLEXIBLE PACKAGES FOR YOUR USE CASE
MACH178 helps you define a methodology for certifying multicore based avionics systems to satisfy A(M)C 20-193, AA-22-01 and similar multicore certification objectives.
By providing template DO-178C planning document additions and verification procedures and checklists for both multicore and single active core projects, MACH178 helps you plan and document your certification approach in a fraction of the time.
The solution:

Selecting the right platform and configuration has a huge impact on interference, verification, project timelines and risk.
MACH178 helps you make evidence-based decisions to evaluate hardware platforms and configurations against performance criteria and timing requirements.
The solution:

If sufficient software performance can be achieved by running on a single active core, deactivating all but one core may be the preferred approach as it can eliminate the need to meet A(M)C 20-193 objectives when done correctly.
MACH178 helps confirm whether single active core is a viable approach for software by supporting performance benchmarking, and provides guidance on which core deactivation methods can be used to eliminate the need to meet A(M)C 20-193 objectives.
It also provides the software tools and qualification support needed to verify software for DO-178C objectives including requirements-based testing, structural coverage, worst-case execution time, and data and control coupling analyses.
The solution:

Certifying software running in full multicore mode requires meeting additional objectives in guidance such as A(M)C 20-193 and AA-22-01.
MACH178 streamlines the path to multicore certification, providing guidance, tools, support and training to ensure efficient mitigation of interference and generation of certification evidence. It includes certification-ready artifacts to identify hardware resources, interference channels and critical configuration settings on a multicore processor, as well as tests that can be run on your platform configuration to verify the impact of multicore interference.
The solution:

Product features

-
 Produce AC 20-193 and AMC 20-193 compliance evidence Produce compliance evidence for DO-178C, AC 20-193 and AMC 20-193.Discover this feature
Produce AC 20-193 and AMC 20-193 compliance evidence Produce compliance evidence for DO-178C, AC 20-193 and AMC 20-193.Discover this feature -
 Characterize and quantify multicore interference Characterize the impact of multicore interference on software worst-case execution time.Discover this feature
Characterize and quantify multicore interference Characterize the impact of multicore interference on software worst-case execution time.Discover this feature -
 Evaluate and select multicore hardware and RTOS Evaluate multicore hardware and RTOS to mitigate interference effects for easier certification.Discover this feature
Evaluate and select multicore hardware and RTOS Evaluate multicore hardware and RTOS to mitigate interference effects for easier certification.Discover this feature -
 Reduce analysis effort through automation An automated tool environment reduces testing and retesting effort.Discover this feature
Reduce analysis effort through automation An automated tool environment reduces testing and retesting effort.Discover this feature -
 Incremental assurance Develop assurance evidence incrementally, supporting Integrated Modular Avionics.Discover this feature
Incremental assurance Develop assurance evidence incrementally, supporting Integrated Modular Avionics.Discover this feature -
 MACH178 Foundations overview MACH178 Foundations provides a library of resources to support planning and implementation of the MACH178 workflow.Discover this feature
MACH178 Foundations overview MACH178 Foundations provides a library of resources to support planning and implementation of the MACH178 workflow.Discover this feature -
 Template plans Template planning documents for DO-178C, AC 20-193 and AMC 20-193 compliance.Discover this feature
Template plans Template planning documents for DO-178C, AC 20-193 and AMC 20-193 compliance.Discover this feature -
 Procedures, templates and checklists Procedures, templates and checklists describing how to use the MACH178 workflow for A(M)C 20-193 compliance.Discover this feature
Procedures, templates and checklists Procedures, templates and checklists describing how to use the MACH178 workflow for A(M)C 20-193 compliance.Discover this feature -
 White Papers White Papers with guidance on various aspects of multicore certification.Discover this feature
White Papers White Papers with guidance on various aspects of multicore certification.Discover this feature -
 Training Training to support your use of MACH178 Foundations and the MACH178 Workflow.Discover this feature
Training Training to support your use of MACH178 Foundations and the MACH178 Workflow.Discover this feature
How MACH 178 supports A(M)C 20-193 compliance
|
A(M)C 20-193 Objective |
Description |
Customer role |
RTOS/HW role |
Rapita role |
|
MCP_Planning_1 |
System description |
Document in PSAC/PHAC |
Early architecture evaluation |
Early platform evaluation |
|
MCP_Planning_2 |
List of MCP shared resources, active HW dynamic features |
Document in PSAC/PHAC, how to verify in SVP |
RTOS + HW information |
HW characterization |
|
MCP_Resource_Usage_1 |
Configuration settings |
Incorporation of recommendations in PSAC, add HLR |
Recommendations of mitigation strategies |
Analysis and recommendations |
|
MCP_Resource_Usage_2 |
Mitigations for inadvertently altered CCS |
Document in PSAC/PHAC, verify and analyze |
N/A |
Architecture analysis, review, test |
|
MCP_Resource_Usage_3 |
List of interference channels and verification methods |
Review results, incorporate in PSAC, identify in HLRs, V&V methods in SVP |
RTOS + HW information |
HW characterization |
|
MCP_Resource_Usage_4 |
In a worst-case scenario, it has been verified that the software's resource demands do not exceed those available |
Review results, incorporate in PSAC, identify in HLRs, V&V methods in SVP |
RTOS information |
HW characterization Analysis and methods Verify and analyze |
|
MCP_Software_1 |
WCET analysis of all SW components |
Support in running tests, review results |
RTOS Information |
WCET analysis and results; we provide evidence on the execution time behavior of your code that takes multicore interference into account |
|
MCP_Software_2 |
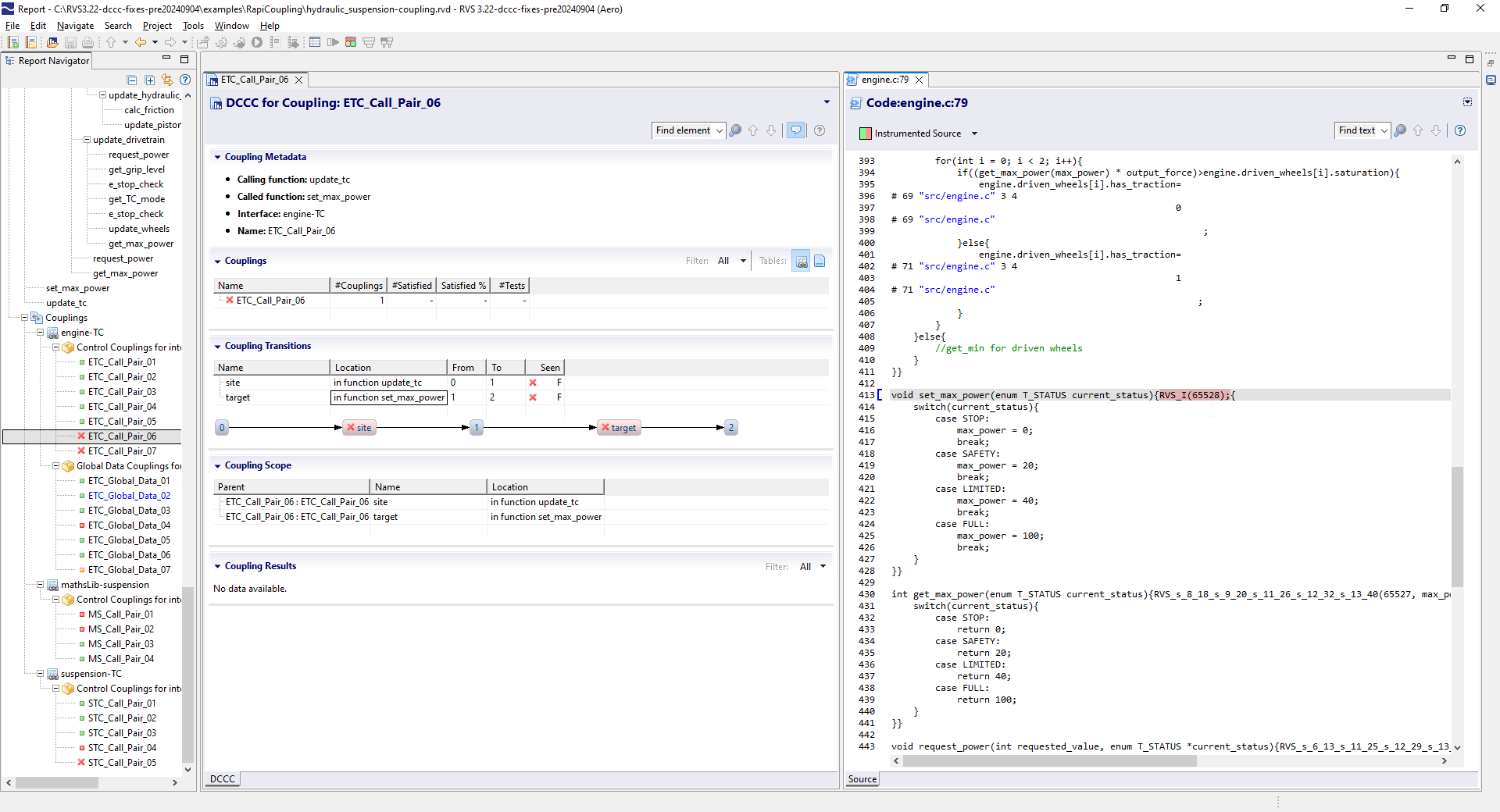
Data Coupling/Control Coupling analysis by RBT |
Customer to define and perform |
N/A |
Tools & services |
|
MCP_Error_Handling_1 |
SafetyNet |
Customer to define and perform |
Customer or RTOS |
Review, test |
|
MCP_Accomplishment_Summary
|
Showing compliance
|
Incorporate results in SAS |
Support
|
Rapita to support evidence; we provide multicore timing evidence that you can easily include in your SAS, including traceability information and a summary of test plans, implementation and results |
Tool qualification
To use outputs generated by MACH 178 Tools for certification, you'll need to qualify the tools. R VS tools and Rapi Daemons are classed as Tool Qualification (TQL) 5 tools as per DO-178C. Qualification support is available for these tools:
- Qualification support is available for Rapi Test and Rapi Time, which have been qualified in multiple DAL A aerospace projects, through our DO-330 Qualification Kits and Qualified Target Integration Service.
- Qualification support is available for Rapi Daemons through our DO-330 Qualification Kits and Rapi Daemon Qualification Service.
Incremental assurance
Using MACH 178, assurance evidence can be developed incrementally and independently for the multicore platform and each hosted application, supporting the development of Integrated Modular Avionics.
The solution is designed to meet use cases for each of the avionics roles identified in DO-297/ED-124, whether you're a Certification Applicant, System Integrator, Platform or Application Supplier. The solution supports the needs of Certification Applicants and System Integrators by defining a consistent strategy for generating certification evidence across all platforms and applications.

A solution for A(M)C 20-193
MACH178 is a solution for meeting multicore DO-178C (AC 20-193 and AMC 20-193) compliance objectives. The solution is a combination of mature products and services designed to address the needs of A(M)C 20-193 compliance through an efficient, robust and reproducible DO-178C-compliant workflow.
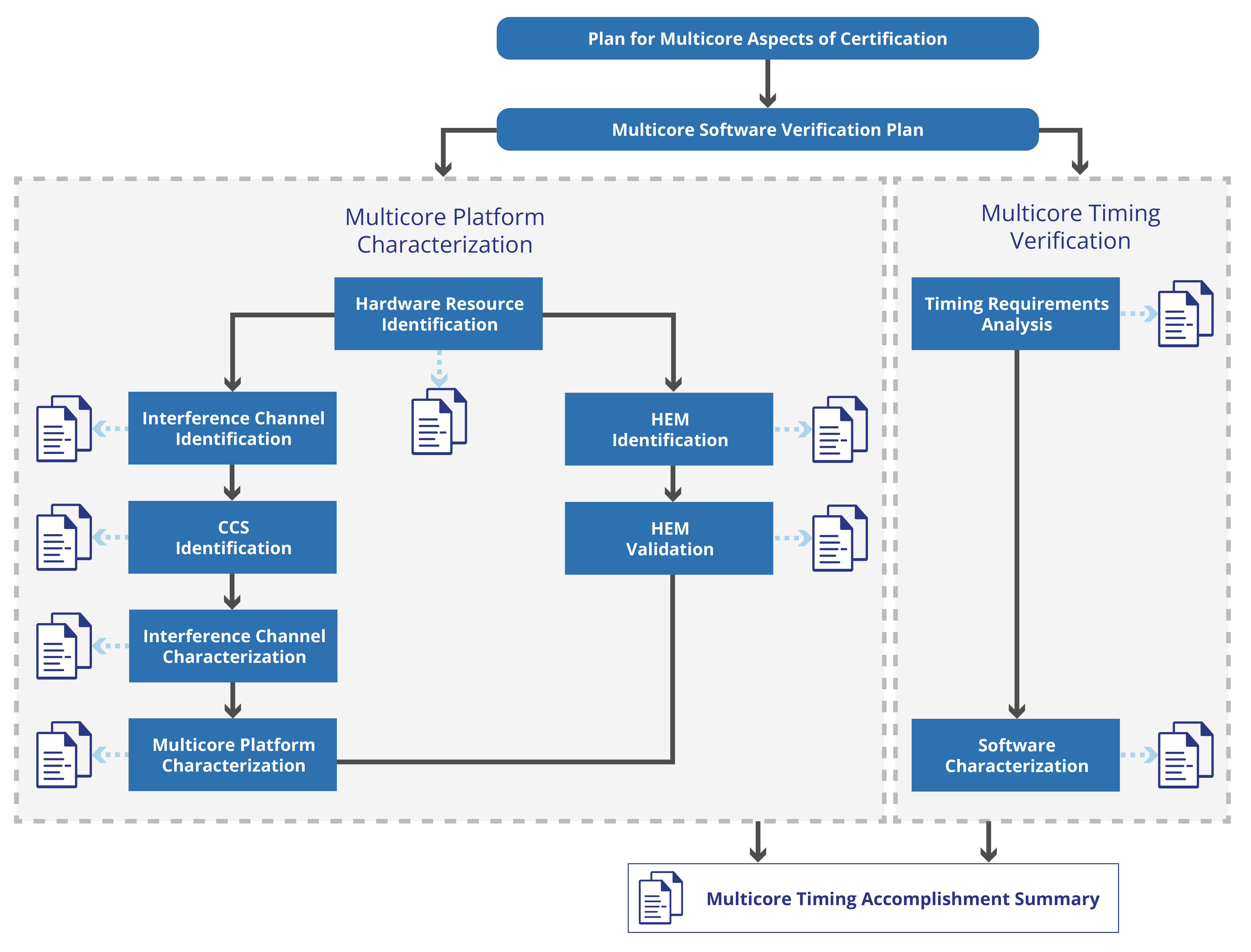
The MACH178 workflow
The MACH178 workflow is a step-by-step workflow to achieve A(M)C 20-193 objectives for multicore DO-178C projects. The workflow is supported by DO-178C plans and procedures, which are available off the shelf for use in your DO-178C project.
MACH178 solutions
The MACH178 solution and workflow is supported by a range of products and services to support you on your compliance journey:

- MACH178 Foundations gives you access to plans, procedures, templates and checklists to apply the MACH178 workflow to your project, as well as white papers on specific multicore topics.
- MACH178 Tools support the targeted generation of multicore interference and the automated collection of compliance evidence during A(M)C 20-193 verification activities.
- MACH178 Services help you produce A(M)C 20-193 verification evidence for your multicore platform, as well as training and consultancy to answer any questions you have.
For more information about each solution, expand the tabs below.
MACH178 Foundations
MACH178 Tools
MACH178 Services

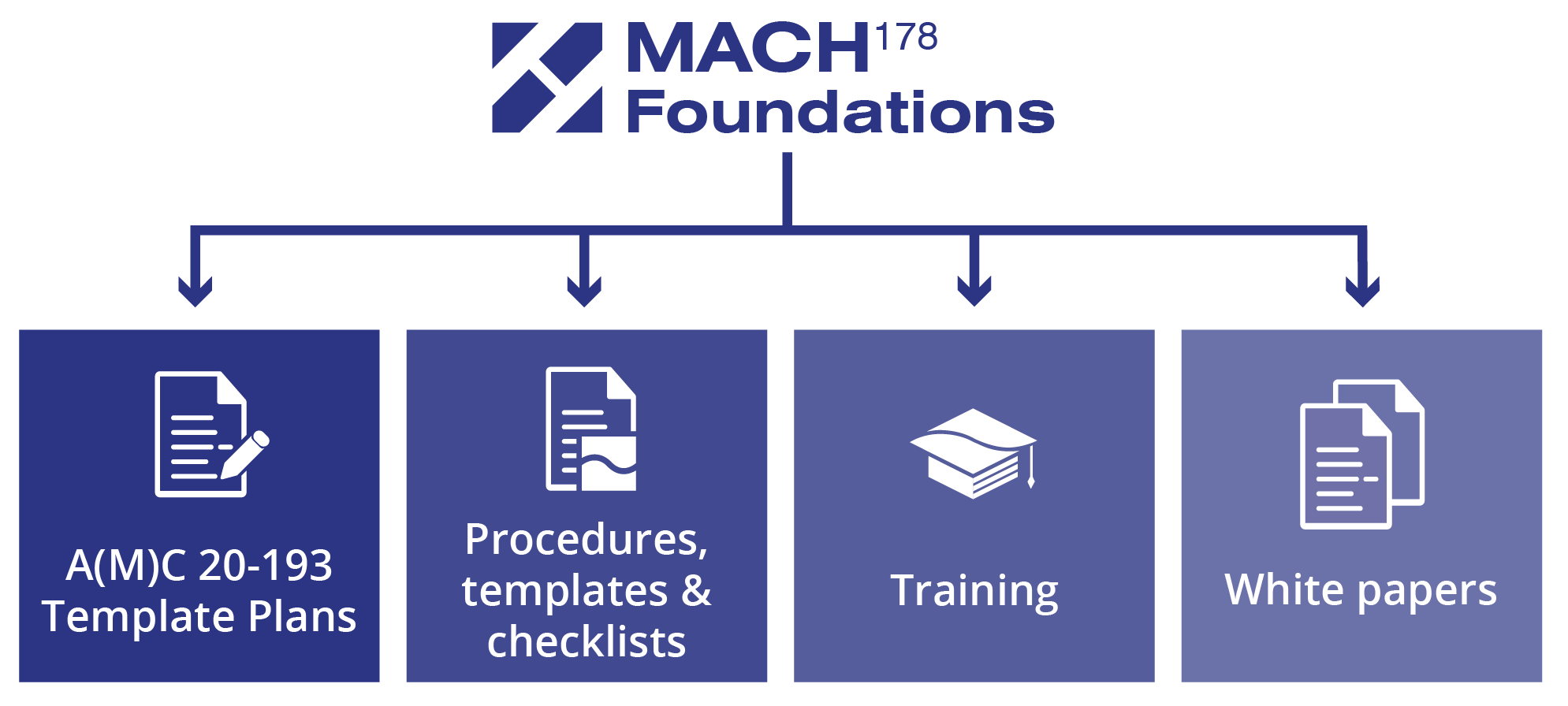
MACH178 Foundations is a library of plans, procedures, checklists and other resources that provide a solid foundation for engineering teams working on multicore DO-178C (AC 20-193 or AMC 20-193) projects, especially when following the MACH178 workflow.
It includes the following documents to support your multicore compliance journey:
- Template plans for A(M)C 20-193 certification (additions to the PSAC and SVP)
- Procedures, templates and checklists to support using the MACH178 workflow for A(M)C 20-193 compliance
- Training resources to help you get started applying the MACH178 workflow to your project
- White papers to provide guidance on specific aspects of multicore certification
MACH178 Foundations and the MACH178 workflow are the culmination of tens of person years of work from specialist multicore hardware and verification engineers at Rapita Systems, making it an excellent stepping stone on your compliance journey.

MACH178 Tools ensure an efficient, robust and reproducible approach to A(M)C 20-193 verification.
MACH178 Tools include the following:
- RapiDaemons enable the targeted generation of traffic on shared hardware resources to generate interference during tests, so the impact of interference on platform and software behavior can be analyzed.
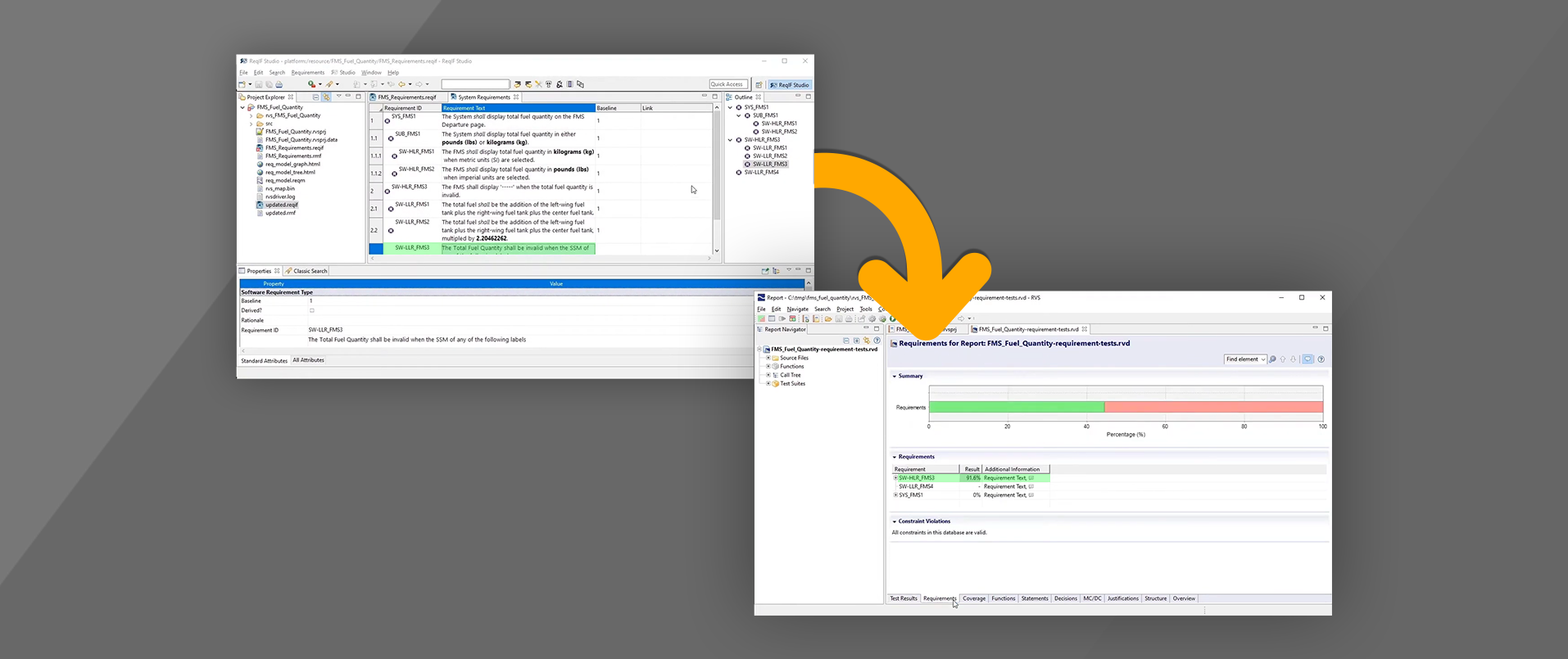
- RapiTest supports writing and executing tests (including the application of RapiDaemons) to analyze and verify software performance.
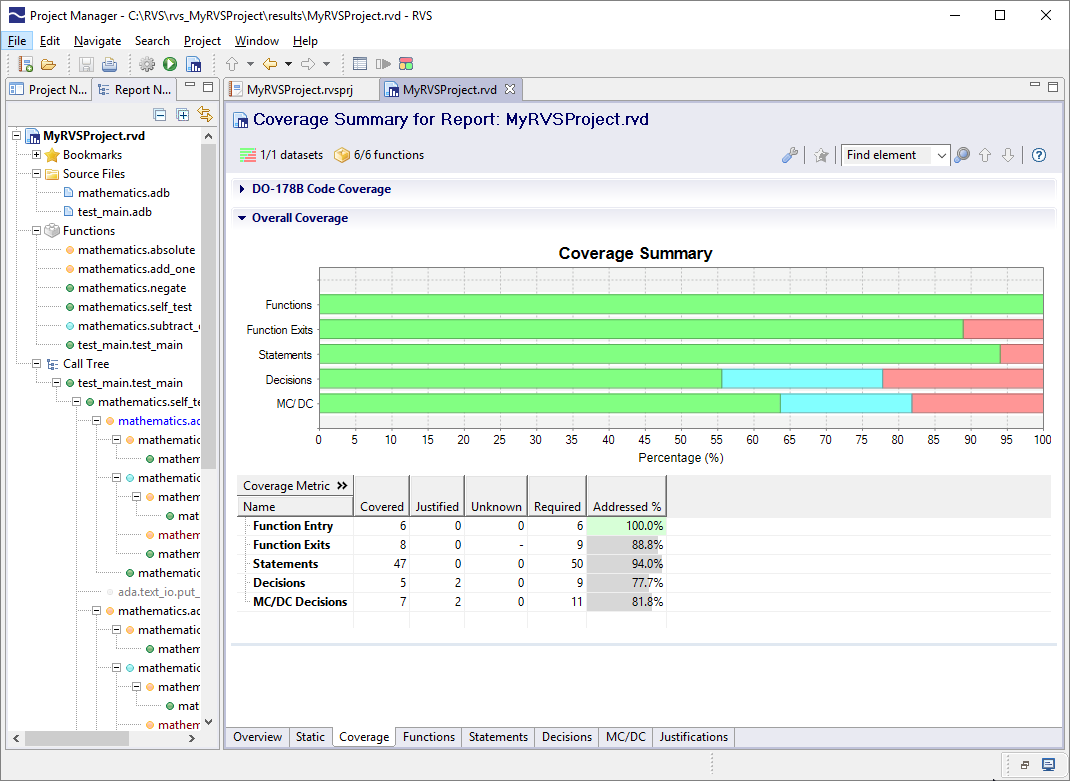
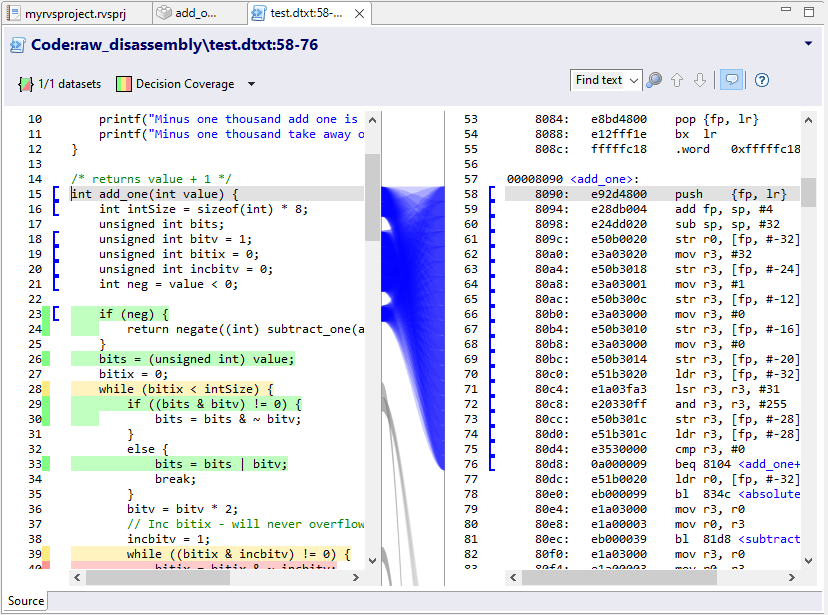
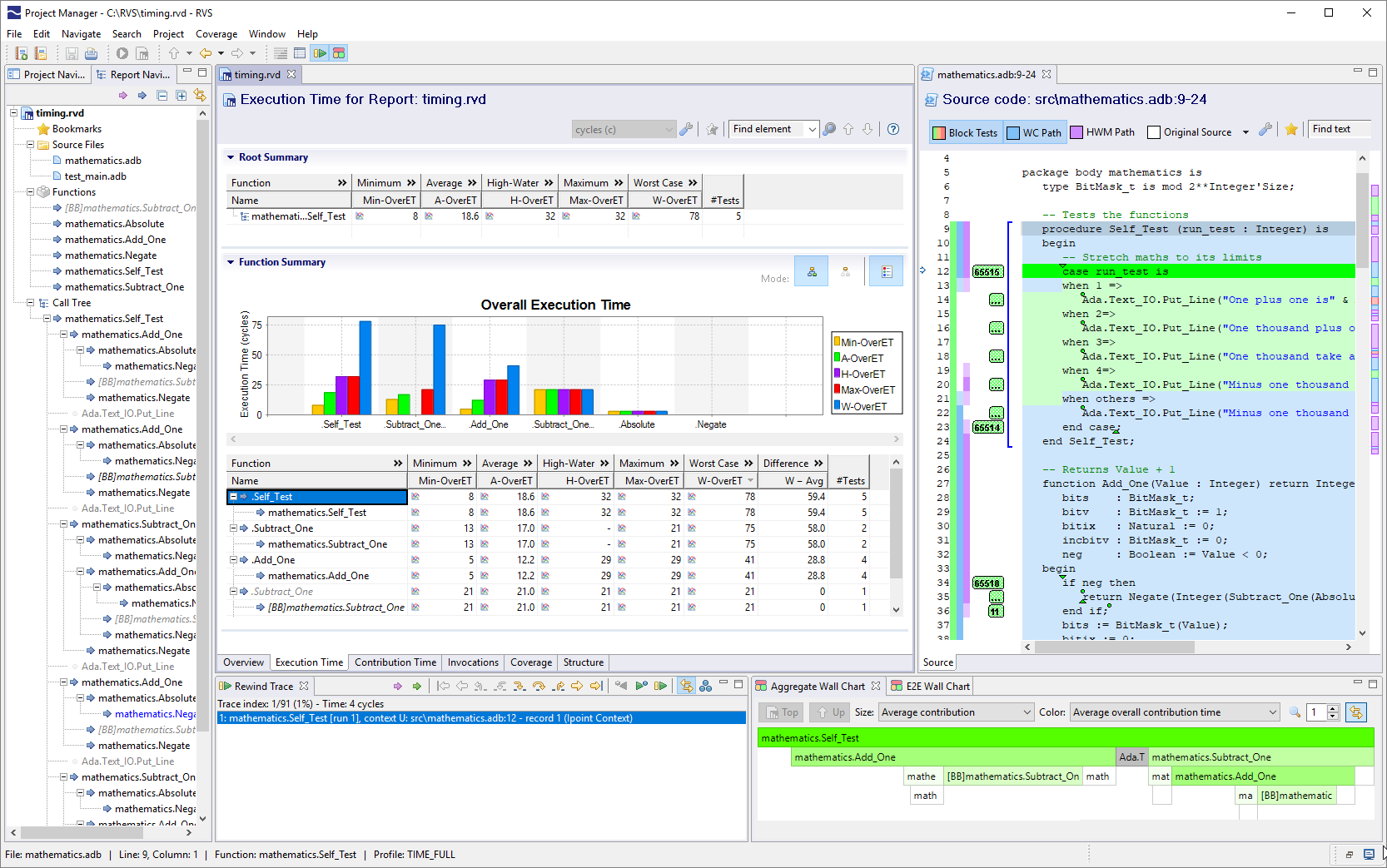
- RapiTime supports collecting performance metrics including execution time and values from Hardware Event Monitors during testing, and analyzing the results.
- RapiTask supports visualizing and analyzing software scheduling.

RapiTest, RapiTime and RapiDaemons, which are used to automate MACH178 processes, are classified as Tool Qualification Level 5 tools as per DO-330. Qualification kits and services provide the evidence needed to qualify their use in MACH178 projects.

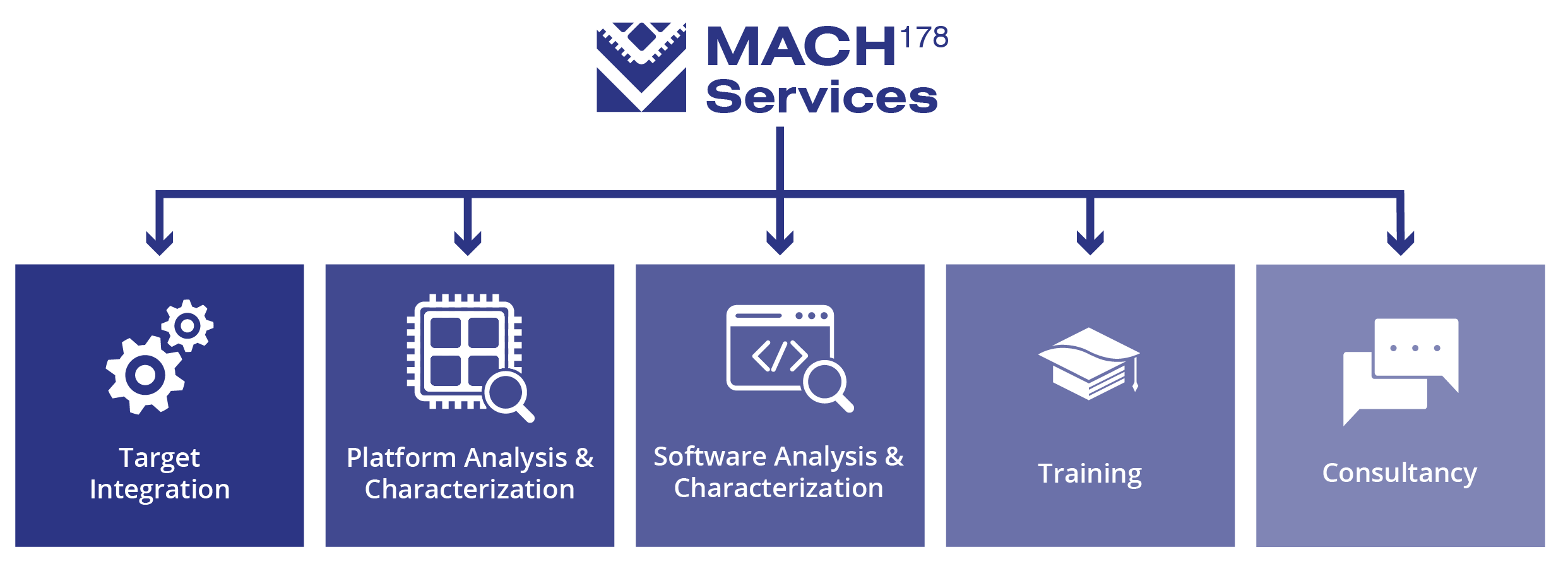
The following services support multicore DO-178C (AC 20-193 and AMC 20-193) compliance using the MACH178 workflow:
- Tool Integration – this service ensures a robust integration of MACH178 software tools into your platform and development environment so verification activities can be performed efficiently
- Platform Analysis and Characterization – this service supports the analysis of interference channels and characterization of their potential impact on specific multicore platforms
- Software Analysis and Characterization – this consultancy service supports your approach to meeting A(M)C 20-193’s MCP_Software_1 and MCP_Software_2 objectives
- Training – we provide a range of training to support your A(M)C 20-193 compliance journey and application of the MACH178 workflow
- Consultancy – we can answer any further questions you have about A(M)C 20-193 compliance with specialist consultancy services




Downloads
News & Blog
Compatibility
We can analyze almost all multicore hardware architectures. See below for a list of components of multicore systems that we have analyzed.
Architectures
We have already analyzed the architectures below and can analyze architectures not on this list:
|
SoC |
Cores |
|---|---|
|
Infineon® AURIX™ |
Tricore™ |
|
NVIDIA® Xavier™ |
Carmel Armv8 |
|
NXP® i.MX 8 |
Arm® Cortex®-A53 |
|
NXP® LS1048A |
Arm® Cortex®-A53 |
|
NXP® LS1088M |
Arm® Cortex®-A53 |
|
NXP® LX2160A |
Arm® Cortex®-A72 |
|
NXP® MPC5777C |
PowerPC® e200, PowerPC® e200Z7 |
|
NXP® P2041 |
PowerPC® e500mc |
|
NXP® T1040/2 |
PowerPC® e5500 |
|
NXP® T2080/1 |
PowerPC® e6500 |
|
TI Keystone™ K2L |
Arm® Cortex®-A15 |
|
TI TMS320F28388D |
TI C28x |
|
Xilinx® Ultrascale+® Zynq MPSoC |
Arm® Cortex®-A53, Arm® Cortex-R5 |
|
Xilinx® Ultrascale+® Zynq RFSoC |
Arm® Cortex®-A53, Arm® Cortex-R5 |
If your architecture is not on the list above, contact us.
RTOSs
We have already analyzed the RTOSs below and can analyze RTOSs not on this list:
|
RTOS |
|---|
|
Bare metal |
|
Blackberry® QNX™ |
|
DDC-I Deos™ |
|
Green Hills® INTEGRITY® |
|
KRONO-SAFE® ASTERIOS® |
|
Lynx Software Technologies LynxSecure® |
|
SYSGO PikeOS® |
|
Vector MICROSAR |
|
Wind River Helix®/VxWorks® |
|
Custom RTOSs |
If your RTOS is not on the list above, contact us.
Boards
We have already analyzed boards from the manufacturers below and can analyze boards from manufacturers not on this list:
|
Board Manufacturer |
|---|
|
Abaco™ |
|
Curtiss-Wright® |
|
Mercury Systems® |
|
North Atlantic Industries™ |
|
NXP® |
|
Texas Instruments® |
|
Xilinx® |
If your board manufacturer is not on the list above, contact us.
Middleware
We have already analyzed middleware from the suppliers on the list below and can analyze middleware from suppliers not on this list:
|
Middleware Supplier |
|---|
|
CoreAVI® |
|
GateWare Communications™ |
|
Presagis® |
|
Richland Technologies™ |
If your middleware manufacturer is not on the list above, contact us.
Frequently asked questions
-
If my RTOS vendor says they provide robust partitioning, why do I need Rapita?
RTOS vendors may provide partitioning mechanisms for their multicore processors, but these do not guarantee the complete elimination of multicore interference. Instead, they are designed to provide an upper limit on interference, sometimes at the expense of average-case performance.
In aerospace, these partitioning mechanisms may be referred to as ‘robust partitioning’. The multicore guidance in AC 20-193, AMC 20-193 and CAST-32A identify allowances for some of the objectives if you have robust partitioning in place, but it is still necessary to verify that the partitioning is as robust as it is claimed to be.
From a certification standpoint, regardless of the methodology behind the RTOS vendor’s approach to eliminating interference, the effectiveness of the technology needs to be verified.
-
Do you support the analysis of GPU-based architectures for multicore timing behavior?
Yes. We have run projects analyzing the Nvidia Xavier AGX (CUDA) and AMD’s Embedded Radeon E9171 GPU (featuring the CoreAVI Vulkan SC driver).
-
Which software tools support MACH178?
The following software tools support multicore DO-178C (AC 20-193 and AMC 20-193) compliance using the MACH178 workflow:
- RapiDaemons enable the targeted generation of traffic on shared hardware resources to generate interference during tests, so the impact of interference on platform and software behavior can be analyzed
- RapiTest supports writing and executing tests (including the application of RapiDaemons) to analyze and verify software performance
- RapiTime supports collecting performance metrics including execution time and values from Hardware Event Monitors during testing, and analyzing the results
- RapiTask supports visualizing and analyzing software scheduling
RapiTest, RapiTime and RapiDaemons, which are used to automate MACH178 processes, are classified as Tool Qualification Level 5 tools as per DO-330. Qualification kits and services provide the evidence needed to qualify their use in MACH178 projects.
